
Researchers have developed a self-printing “growbot” that can move through 3D space.
The device, called “FiloBot”, takes cues from the natural world, and if successful, could transform the world of robotics in a fundamental way.
Let’s back up a bit.
The problem they’re attempting to solve is one of robotic movement. There are plenty of robot designs, and these use a variety of mechanisms for motion, ranging from wheels, to propellers to legs. However, while these approaches have been successful, they are generally not able to traverse complex and dense 3D spaces.
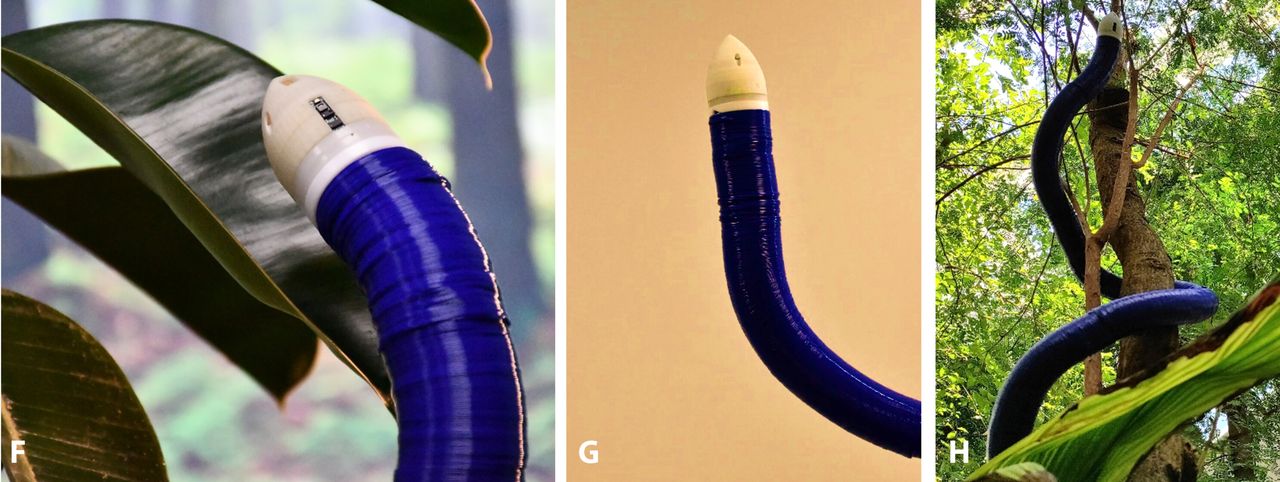
This is where the nature inspiration comes in. Imagine a large tree in a jungle. There’s a vine growing at the base of the tree, and it extends upwards on the tree, wrapping itself on the trunk and later branches.
The vine grows in an opportunistic fashion: at each point it makes a decision about where to grow next. The accumulation of all that growth results in a structure and the end point of the vine is somewhere high up in the tree.
The researchers basically designed a mobile 3D printer to do exactly this.
FiloBot technically uses PLA and FFF processes to produce layers “behind it”, which make up the “vine structure”.
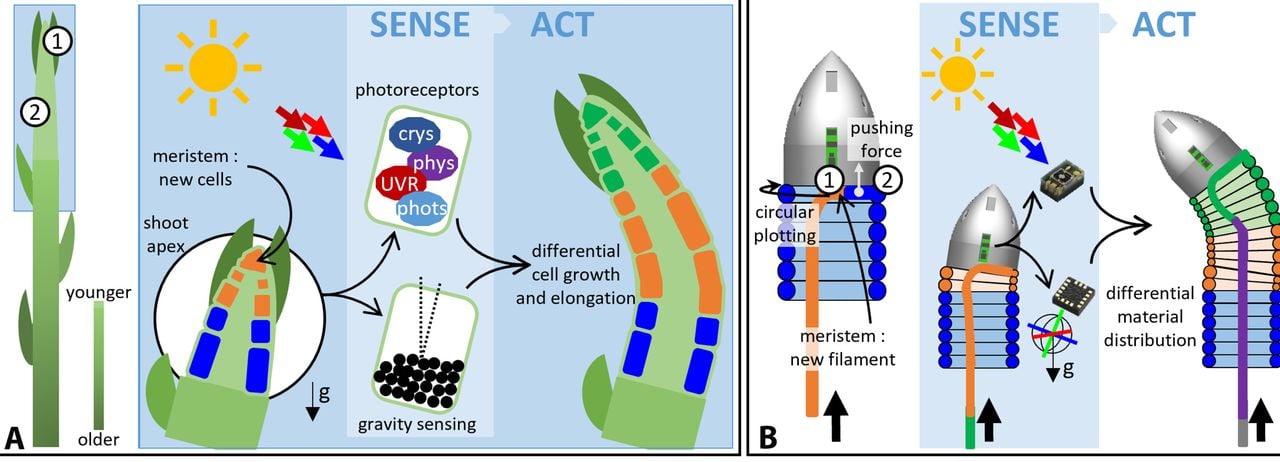
But how does FiloBot “navigate” its path? Again the researchers looked to nature. Prior research has demonstrated that actual vines use light levels to guide their growth path. The researchers explain:
“The robot reacts to environmental constraints and stimuli through a combination of passive morphological adaptation and a bioinspired behavior-based control that uses a vector field method to estimate multitropism-induced growth directions in the apical head. This empowers the robot’s capabilities for exploring different 3D spaces.”
The words are “phototropisms” and “skototropisms”, which means growth responding to a light stimulus and growth away from light.
The result is a robot (or “growbot”) that can successfully navigate through highly complex 3D spaces on its own. They explain how this is done:
“We show that the robot can manage different scenarios and be resilient to unexpected hindrances and general perturbation. The robot can negotiate voids, anchor itself to vertical supports by twining, and navigate the environment through a behavior-based control inspired by tropism behaviors of plants. It also generates diverse body shapes and mechanical properties as adaptive robotic “phenotypic expressions” while negotiating a heterogeneous environment during growth.”
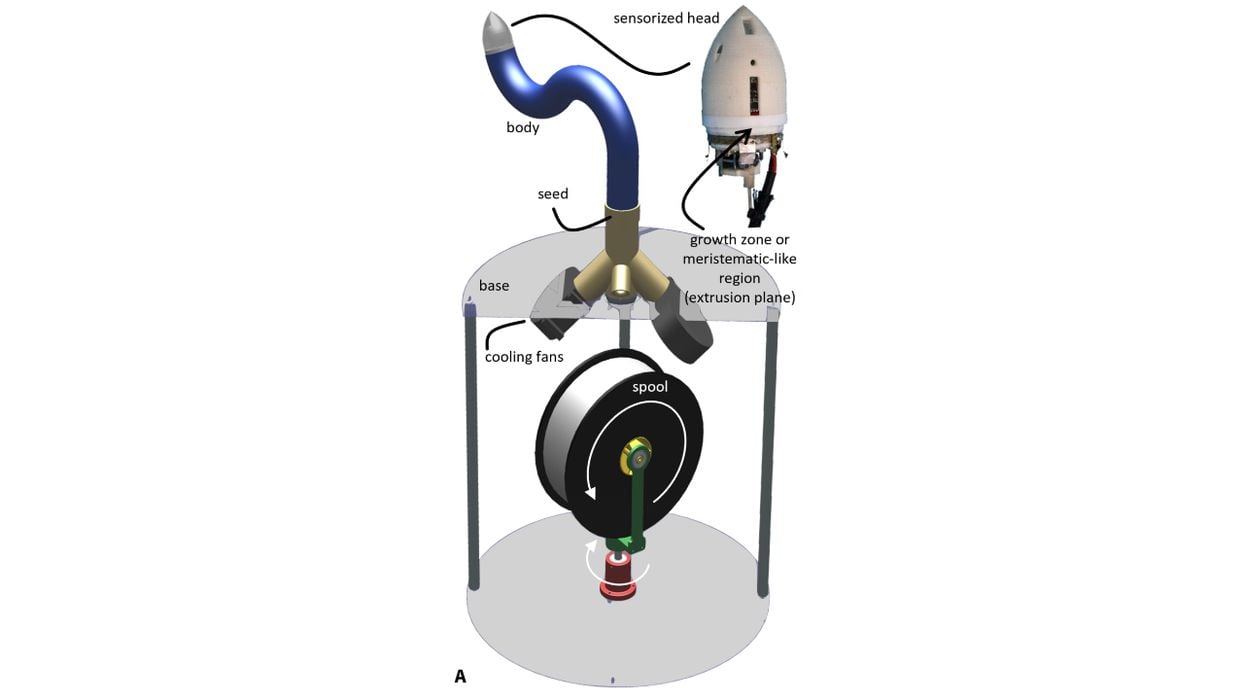
Here is a diagram of how the system is put together. Note that the material is stored inside the a separate unit below, and the filament follows a long path through the printed “body”.
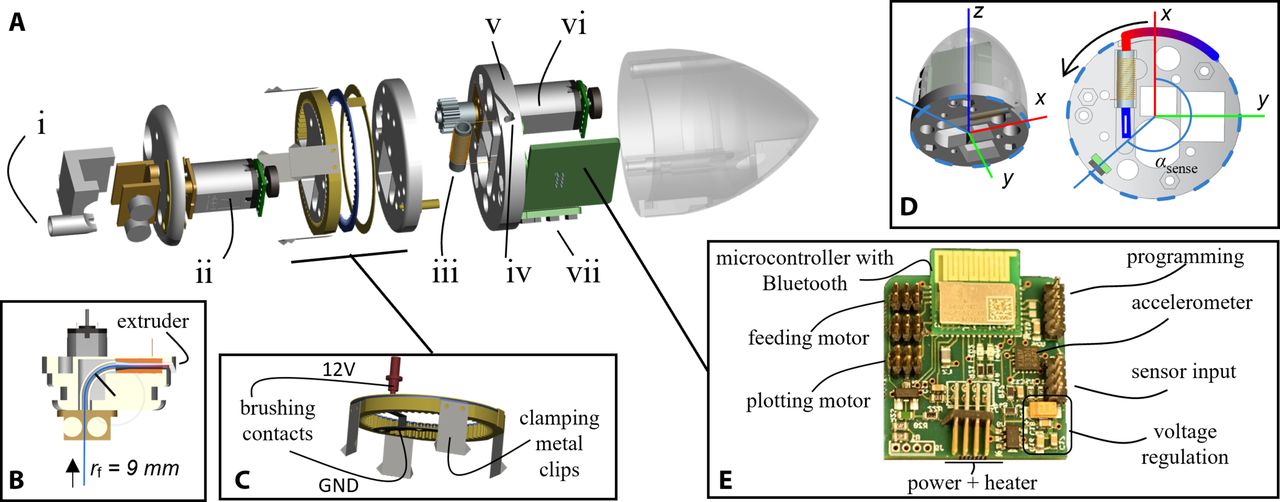
While the hardware is a bit different, it’s basically a 3D printer. The secret to the FiloBot is the highly complex software that transforms sensor readings into GCODE to implement directional changes.
This has to be one of the most unusual 3D printing applications I’ve ever encountered. It is a proof of concept at this stage, but imagine if this could be optimized and commercialized.
Possible applications could include:
- Burrowing air/food conduits to those trapped by earthquake, mine collapse, etc.
- Growing the HVAC ducting in a new building construction
- Exploring the unknown 3D space of an underground cavern
- Carving voids to place reinforcement in aging buildings
I’m quite excited for this concept, as it could open up an enormous number of commercialization opportunities and potentially revolutionize some industries.
Via Science