
A new research paper proposes a design for an unusual “mobile 3D printer”.
The concept is that in a factory or other operation there may be a demand for parts at any time, anywhere in the facility. Normally this demand would be served by someone pulling a part out of a storehouse and transporting it to the requester’s location. This might be termed “manufacture and deliver”.
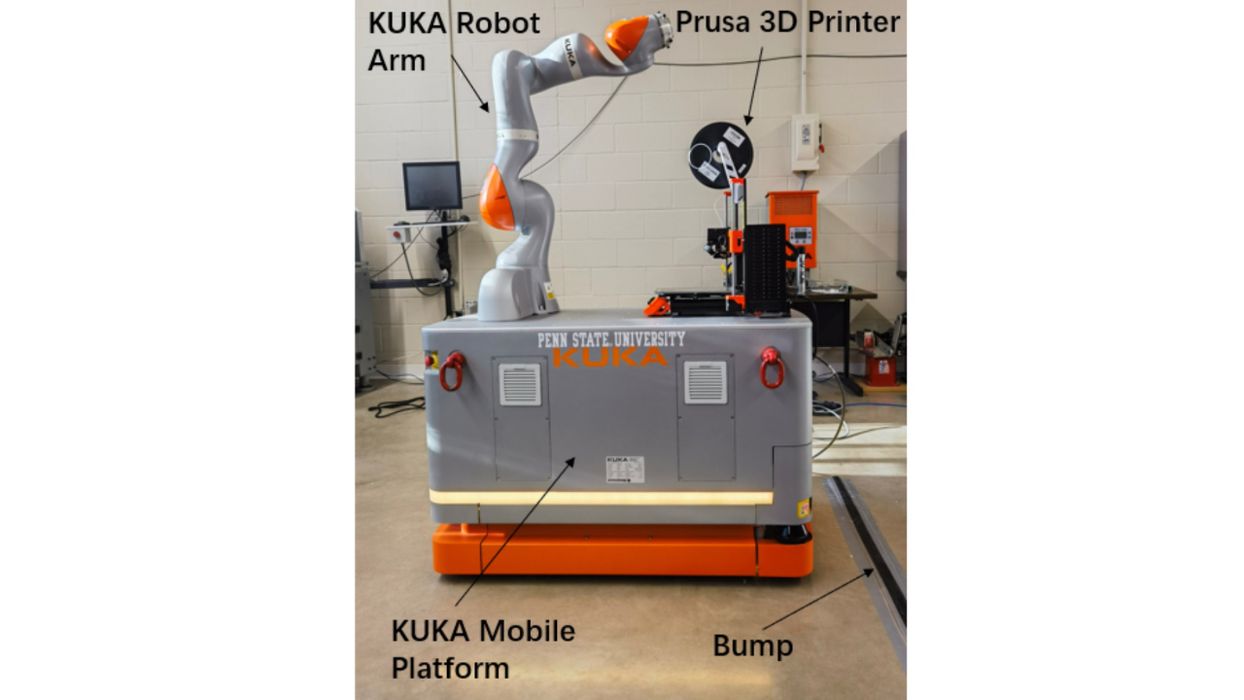
The new concept would involve what’s being called “mobile additive manufacturing technology”. This is in fact a robotic 3D printing system that can move throughout the facility, even while 3D printing operations take place.
This is somewhat reminiscent of the use of robotic system for large-scale construction 3D printing, where build sites are large and outdoors, requiring device movement.
However, those applications are for much larger parts — buildings in fact — and are not particularly applicable for smaller parts as described above.
One of the key aspects of this design is that the “vehicle” is the printer. In other words, the printing can take place while the vehicle is moving. This is quite interesting, because normally the tediously long 3D print jobs must complete before transport takes place. Here, the time is made more efficient by printing DURING transport.
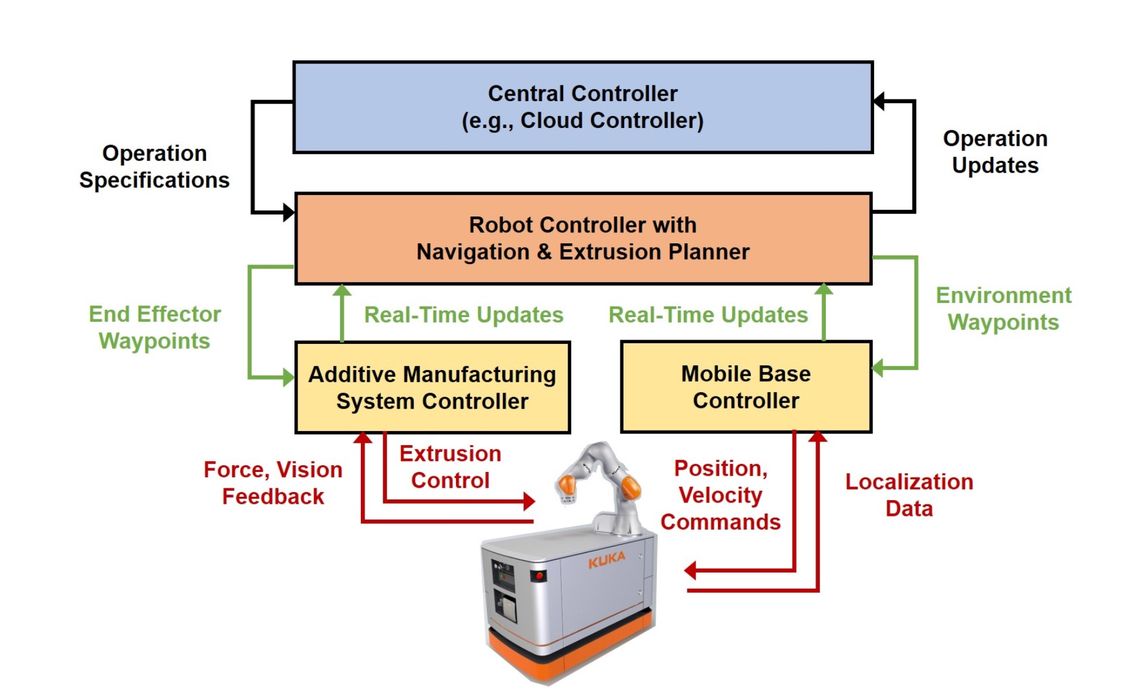
They devised a system, shown here, that includes a complex array of software components that would look after all aspects of operating the 3D printing vehicle.
However, that poses all kinds of interesting problems. They explain:
“For example, the mobile system may be entering a space with an uneven or bumpy floor, requiring the AM system to slow down the extrusion process; or critical sections of the AM process may require the mobile system to slow down or stop to ensure that vibrations from the mobile base do not cause a failure for the print of the part.”
This directed the researchers to investigate the specific effects of such use using an FDM (or FFF, as it was a Prusa device) 3D printer. They defined a series of quality measures to be achieved by the test platform.
They performed a series of experiments running prints while the vehicle was in motion over a variety of irregular surfaces. In some cases the prints met the quality standards, while in others they did not.
They concluded:
“When the KMR operates with low acceleration and minimal vertical vibration, the surface of the printed object displays no noticeable defects within the acceptable range.”
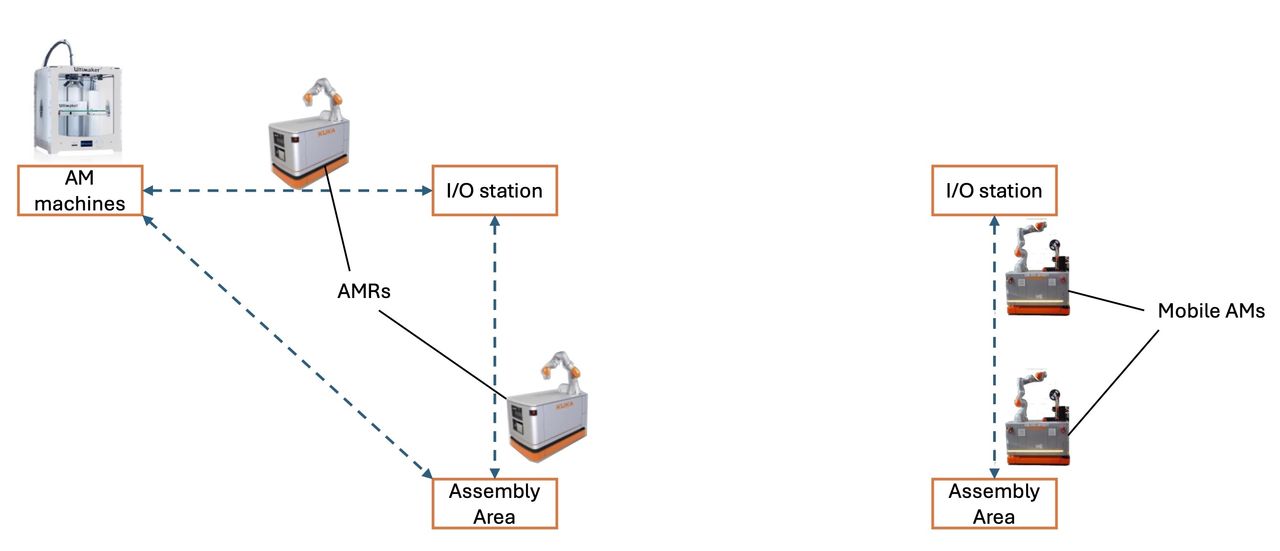
They’re trying to change the use of robotics from the left side in the image above to the right side, where there are fewer points of work. This is probably not applicable for some applications and 3D print jobs, but perhaps usable in many situations.
Via ArXiv