
Researchers have developed an open source architecture for Wire Arc Additive Manufacturing, “WAAM”.
WAAM is a popular 3D printing process, particularly for large-format devices. The idea is to feed standard welding wire feedstock to a toolhead, where a high-energy electrical arc instantly melts the metal. The toolhead is mounted on a robotic arm, which moves around in 3D space, depositing metal to build entire objects.
WAAM is not new; it’s been around for more than a decade. However, there are multiple challenges.
The companies producing WAAM systems don’t build the robotic arms themselves. Instead they simply rely on a variety of commercially available robotic systems from vendors like KUKA, ABB and others. Their systems are bundles of these robots combined with their own toolheads.
A major issue is that the robotic arms come with driver software from their manufacturers that is proprietary. As the robots are primarily sold for applications like welding, they are not necessarily optimized for additive manufacturing with WAAM.
This constrains WAAM producers as they cannot easily customize or tweak the robotic software.
Researchers have now developed a complete open source alternative architecture for robotic WAAM. They explain:
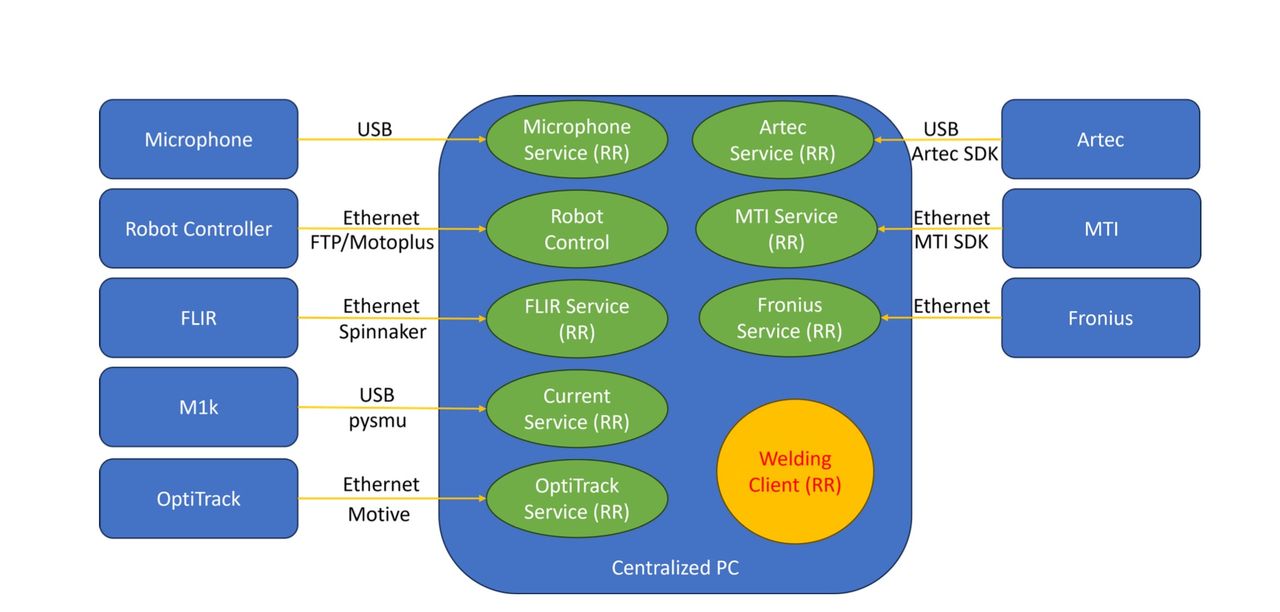
“The foundation of this architecture is Robot Raconteur, an open-source control and communication framework that serves as the middleware for integrating robots and sensors from different vendors. Based on this architecture, we developed an end-to-end robotic WAAM im- plementation that takes a CAD file to a printed WAAM part and evaluates the accuracy of the result. The major components in the architecture include part slicing, robot motion planning, part metrology, in-process sensing, and process tuning.”
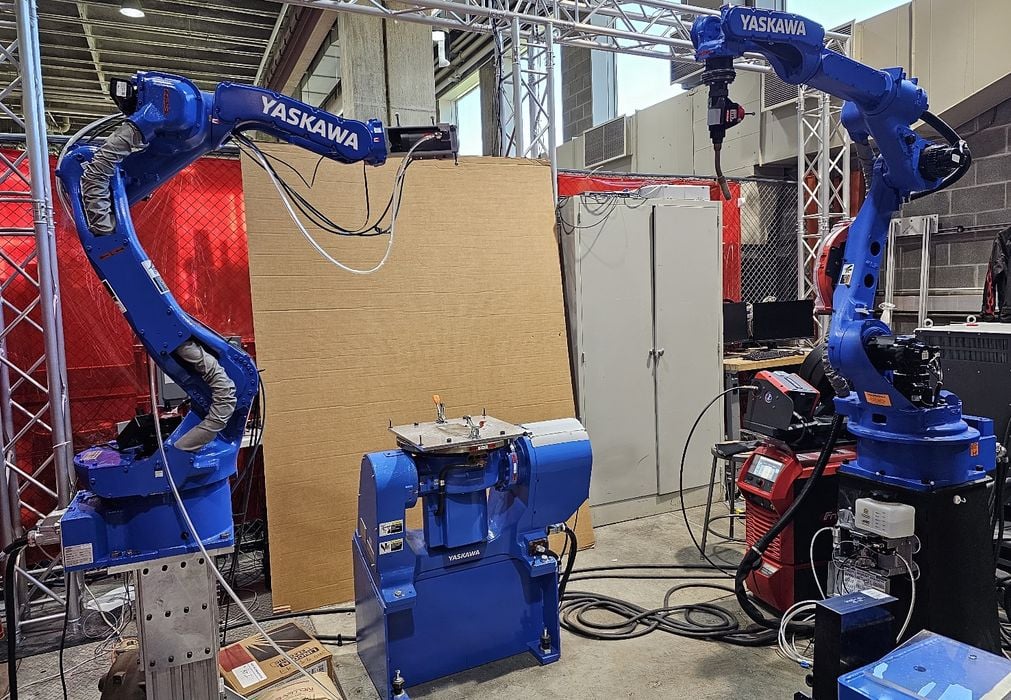
Their demonstration implementation involved Motorman robots and Fronius weld controllers, but they say it is entirely applicable to robots and hardware from other providers.
Does it really work? The researchers performed a number of tests on a variety of part geometries, and then 3D scanned the results to compare with the original CAD models. They report:
“We have printed parts of varying geometric complexity and compared the final parts with the corresponding CAD models. The results show a submillimeter average error. The worst-case shape errors for a model fan blade and a bell are under 3 mm and part width variation less than 15%.”
This could be an incredibly important development for WAAM 3D printer manufacturers, who otherwise tend to be tied to particular robotic vendors. It is possible that through the use of adapted versions of Robot Raconteur they might become device agnostic. That could notably lower prices for systems, as they would introduce competition for the robotic components, and possibly remove the need for expensive vendor software.
While this research focused on WAAM, there are analogous scenarios with polymer-robotic systems. 3D printer manufacturers such as CEAD, Caracol and others use robots and toolheads in the same way as WAAM, except that the toolhead is different. It seems to me that Robot Raconteur could be a launching point for the development of a parallel open source architecture for polymer-robotic 3D printing systems.
This development should be of great interest to any 3D printer manufacturer using robotic arms in their solutions.
Via ArXiv